Yocto Layers
The meta-cassini repository provides three layers compatible with the Yocto
Project, in the following sub-directories:
meta-cassini-bspA Yocto layer which holds board-specific recipes or append files that either:
will not be upstreamed (Cassini specific modifications)
have not been upstreamed yet
For the N1SDP hardware target platform, this layer currently extends the n1sdp machine definition from the meta-arm-bsp layer with additional Trusted Services (crypto, storage, internal trusted storage, attestation , block storage)
meta-cassini-distroA Yocto distribution layer providing top-level and general policies for the Cassini distribution images.
meta-cassini-testsA Yocto software layer with recipes that include run-time tests to validate Cassini functionalities.
Layer Dependency Overview
The following diagram illustrates the layers which are integrated by the
Cassini project, which are further expanded on below.
The layer revisions are related to the Cassini v1.1.0 release.
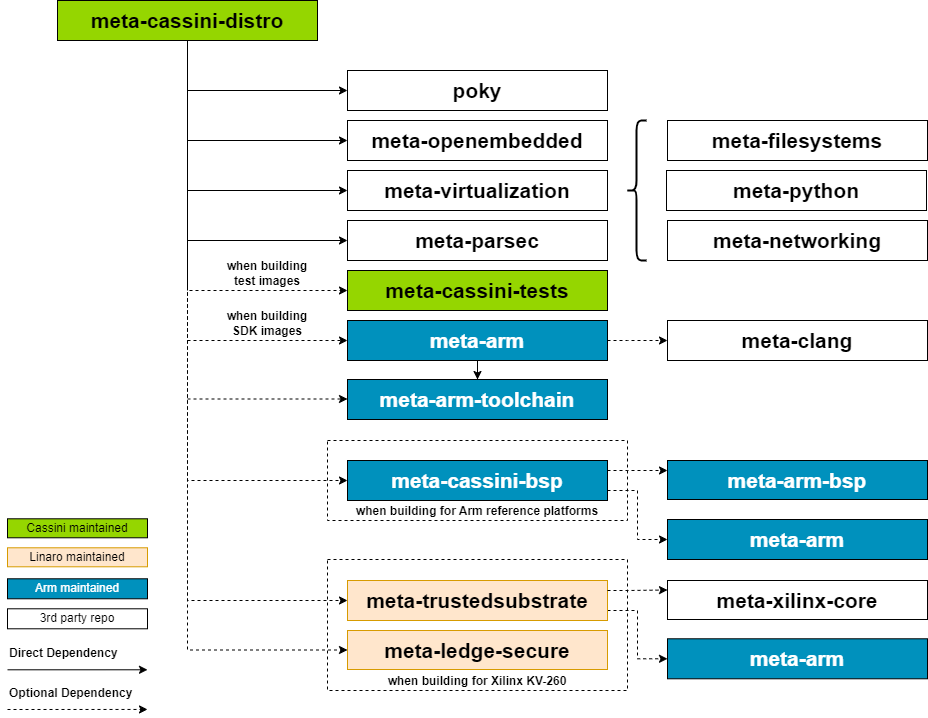
Cassini distribution depends on the following layer dependency sources:
URL: https://git.yoctoproject.org/git/poky layers: meta, meta-poky branch: nanbield revision: bf9f2f6f60387b3a7cd570919cef6c4570edcb82 URL: https://git.openembedded.org/meta-openembedded layers: meta-filesystems, meta-networking, meta-oe, meta-python branch: nanbield revision: 1750c66ae8e4268c472c0b2b94748a59d6ef866d URL: https://git.yoctoproject.org/git/meta-virtualization layer: meta-virtualization branch: nanbield revision: 4372c0ebd99069a5bef99f00ad105bbd35ba3ec2 URL: https://git.yoctoproject.org/git/meta-security layers: meta-parsec branch: nanbield revision: 5938fa58396968cc6412b398d403e37da5b27fce URL: https://github.com/kraj/meta-clang layers: meta-clang branch: nanbield revision: 5170ec9cdfe215fcef146fa9142521bfad1d7d6c
Additional layers are conditionally required, depending on the specific Cassini distribution image being built and the platform being targeted.
URL: https://git.yoctoproject.org/git/meta-arm layers: meta-arm, meta-arm-bsp, meta-arm-toolchain branch: nanbield revision: 0bd7fece412f2e83876ebedf814661915e17bac4 URL: https://github.com/Wind-River/meta-secure-core layers: meta, meta-efi-secure-boot, meta-signing-key branch: nanbield revision: e29165a1031dcf601edbed1733cedd64826672a5 URL: https://gitlab.com/Linaro/trustedsubstrate/meta-ts.git layers: meta-trustedsubstrate branch: ts-v0.4 revision: Not included in last release URL: https://gitlab.com/Linaro/trustedsubstrate/meta-ledge-secure.git layers: meta-ledge-secure branch: main revision: Not included in last release URL: https://github.com/Xilinx/meta-xilinx layers: meta-xilinx-core branch: nanbield revision: Not included in last release
Cassini SDK distribution images require
meta-armandmeta-arm-toolchain, as thegator-daemonpackage is installed on the rootfs.Cassini firmware images built for the Corstone-1000 or N1SDP target platforms requires
meta-arm,meta-arm-bsp, andmeta-arm-toolchain.Cassini firmware images built for the Corstone-1000 also use
efi-secure-bootand its dependencies to generate certificates for UEFI capsule imagesCassini firmware images built for KV260 also require
meta-arm,meta-arm-toolchain,meta-trustedsubstrate,meta-xilinx-core, andmeta-ledge-secure.