Introduction
Project Cassini is the open, collaborative, standards-based initiative to deliver a seamless cloud-native software experience for devices based on Arm Cortex-A.
Current release of Cassini distribution provides a framework for deployment and orchestration of applications (edge runtime) within containers and support for platform abstraction for security (PARSEC).
Future releases of Cassini distribution will include support for provisioning the platform and update all components of software stack over the air. In addition, optionally utilize PARSEC to secure those operations.
Use-Case Overview
Cassini aims to facilitate the deployment of application workloads via Docker and K3s use-case on the supported target platforms.
Instructions for achieving these use-cases are given in the build section, subject to relevant assumed technical knowledge as listed later in documentation assumptions.
Architecture
The following diagram illustrates the Cassini Architecture.
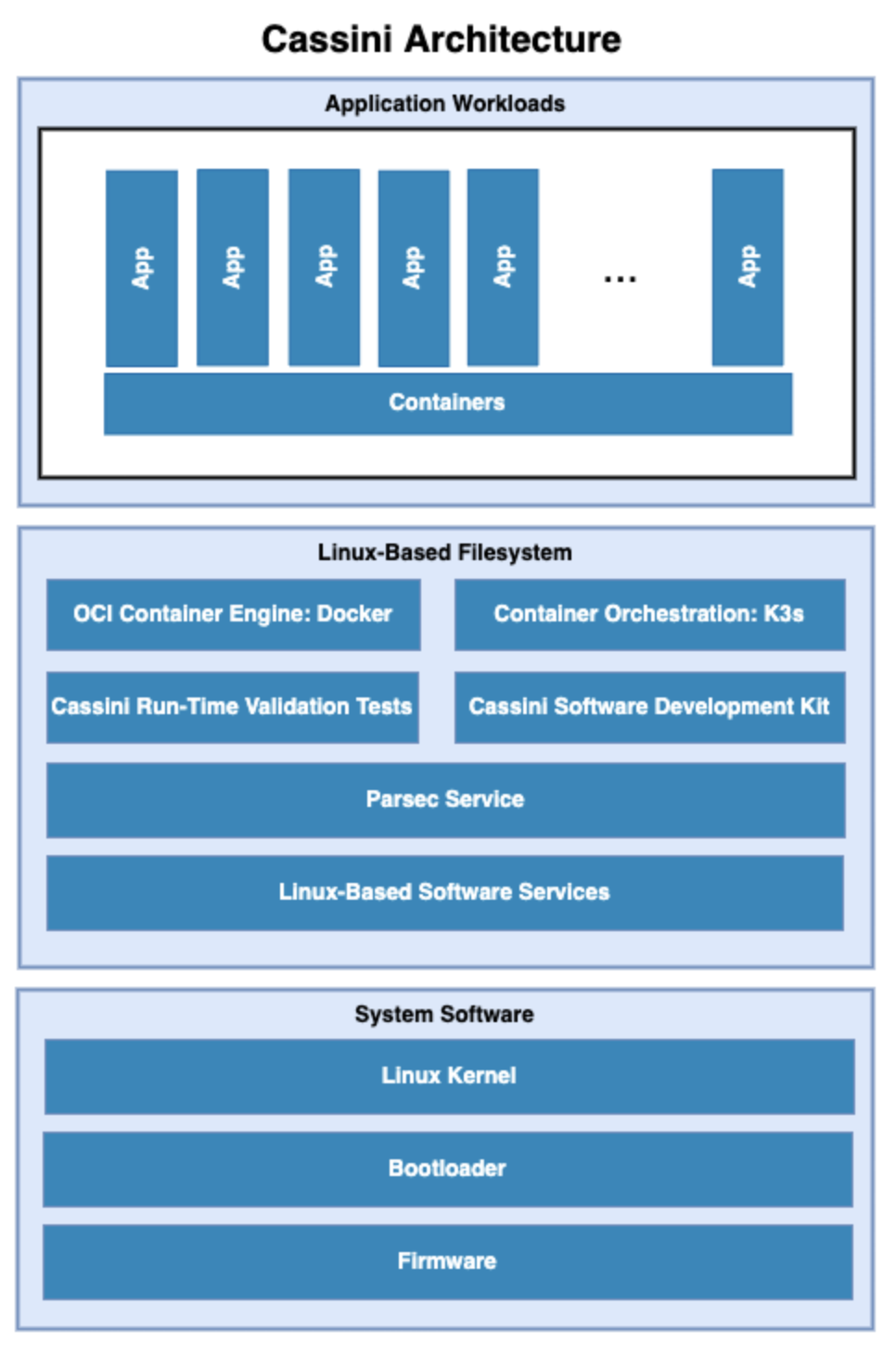
The different software layers are described below:
Application workloads:
User-defined container applications that are deployed and executed on the Cassini software stack. Note that the Cassini project provides the system infrastructure for user workloads, and not the application workloads themselves. Instead, they should be deployed by end-users according to their individual use-cases.
Linux-based filesystem:
This is the main component provided by the Cassini project. The Cassini filesystem contains tools and services that provide Cassini core functionalities and facilitate secure deployment and orchestration of user application workloads. These tools and services include the Parsec service, the Docker container engine, the K3s container orchestration framework, together with their run-time dependencies. In addition, Cassini provides supporting packages such as those which enable run-time validation tests or software development capabilities on the target platform.
System software:
System software specific to the target platform, composed of firmware, bootloader and the operating system.
Features Overview
Cassini includes the following major features:
Container engine and runtime with Docker and runc-opencontainers.
Container workload orchestration with the K3s Kubernetes distribution.
Parsec service and Parsec tool
On-target development support with optionally included Software Development Kit.
Validation support with optionally included run-time integration tests, and build-time kernel configuration checks.
Other features of Cassini include:
The features provided by the
poky.confdistribution, which Cassini extends.Systemd used as the init system.
RPM used as the package management system.
Documentation Assumptions
This documentation assumes a base level of knowledge related to different aspects of achieving the target use-case via Cassini:
Application workload containerization, deployment, and orchestration
This documentation does not provide detailed guidance on developing application workloads, deploying them, or managing their execution via Docker or the K3s orchestration framework, and instead focuses on Cassini-specific instructions to support these activities on an Cassini distribution image.
For information on how to use these technologies which are provided with the Cassini distribution, see the Docker documentation and the K3s documentation.
The Yocto Project
This documentation contains instructions for achieving Cassini’s use-case using a set of included configuration files that provide standard build features and settings. However, Cassini forms a distribution layer for integration with the Yocto project and is thus highly configurable and extensible. This documentation supports those activities by detailing the available options for Cassini-specific customizations and extensions, but assumes knowledge of the Yocto project necessary to prepare an appropriate build environment with these options configured.
Readers are referred to the Yocto Project Documentation for information on setting up and running non-standard Cassini distribution builds.
Repository Structure
The meta-cassini repository is structured as follows:
meta-cassini:
meta-cassini-bspA Yocto layer which holds board-specific recipes or append files that either:
will not be upstreamed (Cassini specific modifications)
have not been upstreamed yet
meta-cassini-distroA Yocto distribution layer providing top-level and general policies for the Cassini distribution images.
meta-cassini-testsA Yocto software layer with recipes that include run-time tests to validate Cassini functionalities.
kasDirectory which contains files to support use of the kas build tool.
Repository License
The repository’s standard license is the MIT license (more details in License), under which most of the repository’s content is provided. Exceptions to this standard license relate to files that represent modifications to externally licensed works (for example, patch files). These files may therefore be included in the repository under alternative licenses in order to be compliant with the licensing requirements of the associated external works.
Contributions to the project should follow the same licensing arrangement.
Contributions and Issue Reporting
Guidance for contributing to the Cassini project can be found at Contributing.
To report issues with the repository such as potential bugs, security concerns, or feature requests, please submit an Issue via GitLab Issues, following the project’s template.
For known issues in this release, see Release Notes.
Feedback and support
To request support please contact Linaro at support@linaro.org.
Maintainer(s)
Cassini Team